





二维变换
线性变换
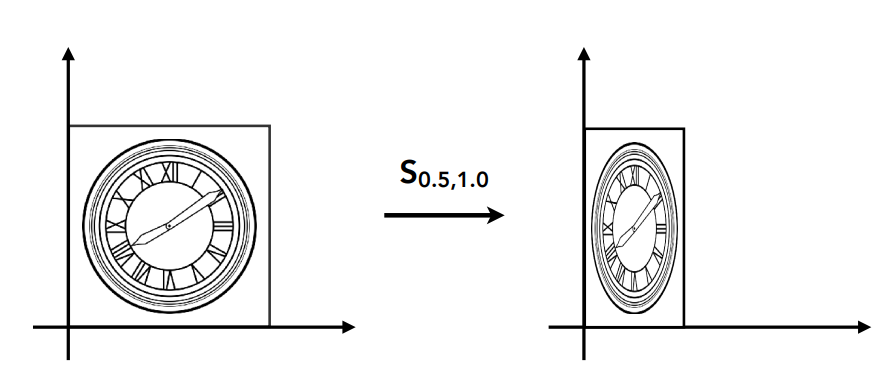
缩放
$$\begin{bmatrix}
x^{\prime} \\
y^{\prime}
\end{bmatrix}=\begin{bmatrix}
s_x & 0 \\
0 & s_y
\end{bmatrix}\begin{bmatrix}
x \\
y
\end{bmatrix}$$
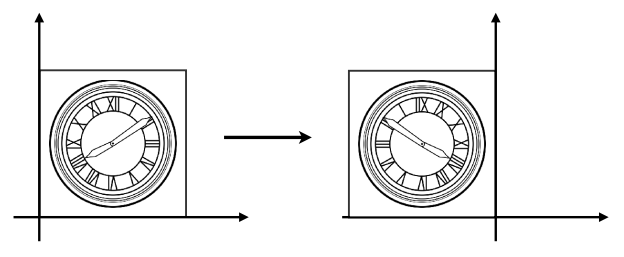
翻转
$$\begin{bmatrix}
x^{\prime} \\
y^{\prime}
\end{bmatrix}=\begin{bmatrix}
1 & a \\
0 & 1
\end{bmatrix}
\begin{bmatrix}
x \\
y
\end{bmatrix}$$
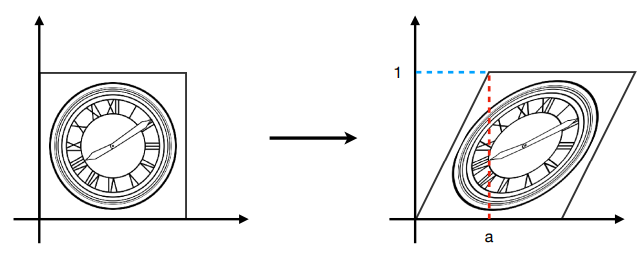
切变
$$
\begin{bmatrix}
x^{\prime} \\
y^{\prime}
\end{bmatrix}=\begin{bmatrix}
1 & a \\
0 & 1
\end{bmatrix}
\begin{bmatrix}
x \\
y
\end{bmatrix}
$$
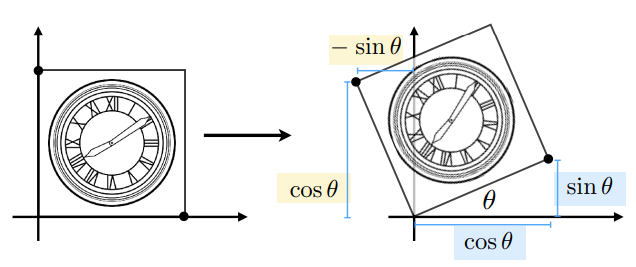
旋转
旋转时默认绕坐标原点旋转
$$
\mathbf{R}_\theta=
\begin{bmatrix}
\cos \theta & -\sin \theta \\
\sin \theta & \cos \theta
\end{bmatrix}
$$
旋转$-\theta$ 时
$$
\mathbf{R}_{-\theta}=
\begin{bmatrix}
\cos \theta & \sin \theta \\
-\sin \theta & \cos \theta
\end{bmatrix}= \mathbf{R}_{\theta}^T= \mathbf{R}_{\theta}^{-1}
$$
也就是旋转$\theta$ 时的转置和逆运算
线性变换
$$
\begin{bmatrix}
x^{\prime} \\
y^{\prime}
\end{bmatrix}=\begin{bmatrix}
a & b \\
c & d
\end{bmatrix}
\begin{bmatrix}
x \\
y
\end{bmatrix}
$$
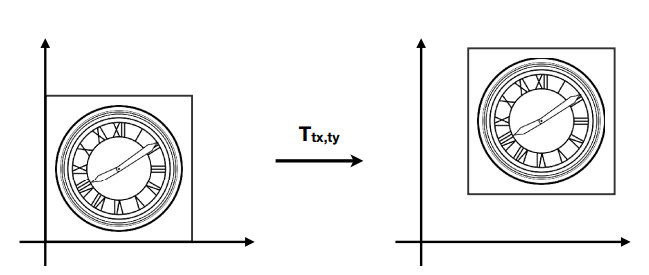
平移
$$
\begin{bmatrix}
x^{\prime} \\
y^{\prime}
\end{bmatrix}=\begin{bmatrix}
a & b \\
c & d
\end{bmatrix}\begin{bmatrix}
x \\
y
\end{bmatrix}+\begin{bmatrix}
t_x \\
t_y
\end{bmatrix}
$$
齐次坐标
点和向量的表示方法和计算
2D点 = $(x, y, 1)^{\top}$
2D向量 = $(x, y, 0)^{\top}$
向量+向量=向量
点-点=向量
点+向量=坐标
点+点=$
\begin{bmatrix}
x / w \\
y / w \\
1
\end{bmatrix}, w \neq 0
$
利用齐次坐标的进行平移变换
$$
\begin{bmatrix}
x^{\prime} \\
y^{\prime} \\
w^{\prime}
\end{bmatrix}=\begin{bmatrix}
1 & 0 & t_x \\
0 & 1 & t_y \\
0 & 0 & 1
\end{bmatrix}\cdot\begin{bmatrix}
x \\
y \\
1
\end{bmatrix}=\begin{bmatrix}
x+t_x \\
y+t_y \\
1
\end{bmatrix}
$$
二维仿射变换
仿射变换
仿射变换=线性变换+平移
$$
\begin{bmatrix}
x^{\prime} \\
y^{\prime} \\
1
\end{bmatrix}=\begin{bmatrix}
a & b & t_x \\
c & d & t_y \\
0 & 0 & 1
\end{bmatrix}\cdot\begin{bmatrix}
x \\
y \\
1
\end{bmatrix}
$$
缩放
$$
\mathbf{S}\left(s_x, s_y\right)=
\begin{bmatrix}
s_x & 0 & 0 \\
0 & s_y & 0 \\
0 & 0 & 1
\end{bmatrix}
$$
旋转
$$
\mathbf{R}(\alpha)=
\begin{bmatrix}
\cos \alpha & -\sin \alpha & 0 \\
\sin \alpha & \cos \alpha & 0 \\
0 & 0 & 1
\end{bmatrix}
$$
平移
$$
\mathbf{T}\left(t_x, t_y\right)=
\begin{bmatrix}
1 & 0 & t_x \\
0 & 1 & t_y \\
0 & 0 & 1
\end{bmatrix}
$$
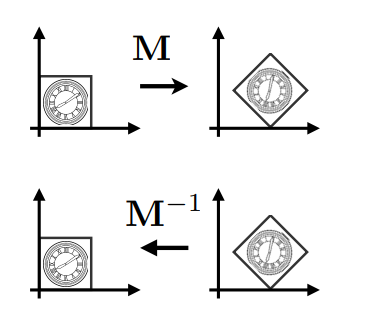
逆变换
$M^{-1}$ 在矩阵和几何意义上都是变换 $M$ 的逆变换
复合变换
完成以下变换:
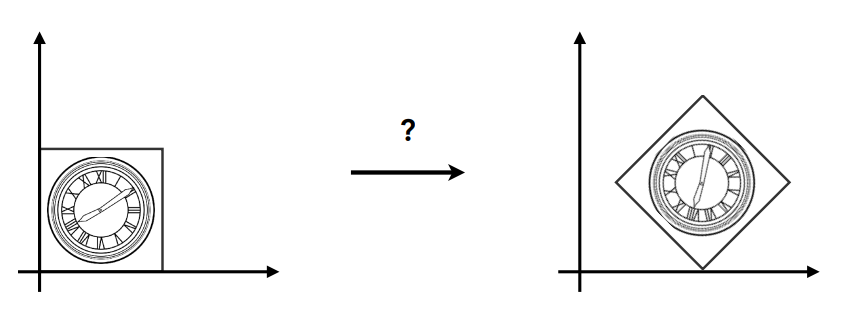
需要先旋转、再平移,因为旋转时以坐标原点为中心的:
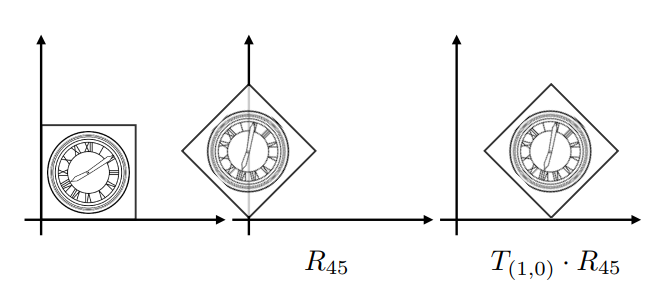
如果先平移、再旋转,则会得到已下结果:
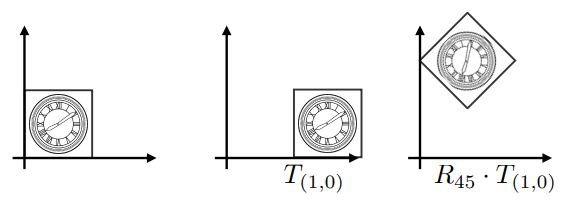
矩阵的乘法是没有交换律的,所以:
$$R_{45} \cdot T_{(1,0)} \neq T_{(1,0)} \cdot R_{45}$$
矩阵的计算是从右往左的:
$$
T_{(1,0)} \cdot R_{45}
\begin{bmatrix}
x \\
y \\
1
\end{bmatrix}=\begin{bmatrix}
1 & 0 & 1 \\
0 & 1 & 0 \\
0 & 0 & 1
\end{bmatrix}\begin{bmatrix}
\cos 45^{\circ} & -\sin 45^{\circ} & 0 \\
\sin 45^{\circ} & \cos 45^{\circ} & 0 \\
0 & 0 & 1
\end{bmatrix}\begin{bmatrix}
x \\
y \\
1
\end{bmatrix}
$$
连续变换
如果有一个仿射变换序列A1,A2,A3,…
$$
\mathbf{A}_n \cdots \mathbf{A}_2 \cdot \mathbf{A}_1 \cdot
\begin{bmatrix}
x \\
y \\
1
\end{bmatrix}
$$
可以通过矩阵乘法的分配率来改变运算顺序,先算前面的 $\mathbf{A}_n \cdots \mathbf{A}_2 \cdot \mathbf{A}_1 \cdot $,然后再和坐标向量相乘
分解复杂变换
如果需要旋转一个顶点不在坐标原点的图像,需要先将图像平移到坐标原点,再旋转,最后再平移回去
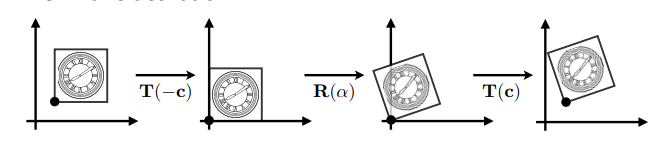
$$\mathbf{T}(\mathbf{c}) \cdot \mathbf{R}(\alpha) \cdot \mathbf{T}(-\mathbf{c})$$
三维齐次坐标
3D点 = $(x, y, z, 1)^{\top}$
3D向量 = $(x, y, z, 0)^{\top}$
向量+向量=向量
点-点=向量
点+向量=坐标
点+点=$
\begin{bmatrix}
x / w \\
y / w \\
z / w \\
1
\end{bmatrix}, w \neq 0
$
三维仿射变换
矩阵表示
$$
\begin{bmatrix}
x^{\prime} \\
y^{\prime} \\
z^{\prime} \\
1
\end{bmatrix}=\begin{bmatrix}
a & b & c & t_x \\
d & e & f & t_y \\
g & h & i & t_z \\
0 & 0 & 0 & 1
\end{bmatrix}\cdot\begin{bmatrix}
x \\
y \\
z \\
1
\end{bmatrix}
$$
仿射变换
缩放
$$
\mathbf{S}
\left(s_x, s_y, s_z\right)=
\begin{bmatrix}
s_x & 0 & 0 & 0 \\
0 & s_y & 0 & 0 \\
0 & 0 & s_z & 0 \\
0 & 0 & 0 & 1
\end{bmatrix}
$$
平移
$$
\mathbf{T}\left(t_x, t_y, t_z\right)=
\begin{bmatrix}
1 & 0 & 0 & t_x \\
0 & 1 & 0 & t_y \\
0 & 0 & 1 & t_z \\
0 & 0 & 0 & 1
\end{bmatrix}
$$
旋转
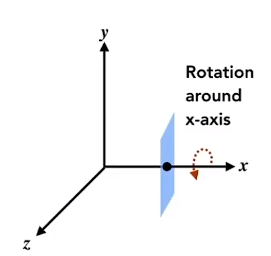
绕x轴旋转
x坐标不变
$$
\mathbf{R}_x(\alpha)=
\begin{bmatrix}
1 & 0 & 0 & 0 \\
0 & \cos \alpha & -\sin \alpha & 0 \\
0 & \sin \alpha & \cos \alpha & 0 \\
0 & 0 & 0 & 1
\end{bmatrix}
$$
绕y轴旋转
y坐标不变
$$
\mathbf{R}_y(\alpha)=
\begin{bmatrix}
\cos \alpha & 0 & \sin \alpha & 0 \\
0 & 1 & 0 & 0 \\
-\sin \alpha & 0 & \cos \alpha & 0 \\
0 & 0 & 0 & 1
\end{bmatrix}
$$
绕z轴旋转
z坐标不变
$$
\mathbf{R}_z(\alpha)=
\begin{bmatrix}
\cos \alpha & -\sin \alpha & 0 & 0 \\
\sin \alpha & \cos \alpha & 0 & 0 \\
0 & 0 & 1 & 0 \\
0 & 0 & 0 & 1
\end{bmatrix}
$$
罗德里格斯旋转公式
绕轴n旋转角度α,默认旋转轴n过原点
$$
\mathbf{R}(\mathbf{n}, \alpha)=\cos (\alpha) \mathbf{I}+(1-\cos (\alpha)) \mathbf{n} \mathbf{n}^T+\sin (\alpha) \underbrace{
\begin{bmatrix}
0 & -n_z & n_y \\
n_z & 0 & -n_x \\
-n_y & n_x & 0
\end{bmatrix}
}_{\mathbf{N}}
$$
Comments | NOTHING